
RobotX 2022 に向けた新しいタスクが先日リリースされました.コンセプトに近い部分があって詳細が分からないところもありますが,ここで簡単に紹介してみます.(ビビッと来た人は是非OUXTまで!!)
RobotX とは
ボートサイズの船舶の自動運転を中核として,USV・UAV・UUVを用いた各種タスクの達成度合いを競う国際ロボコンです.実機動作に加えてプレゼンテーションや,論文による審査なども行われます.
2021年2月3日に RoboNation から2022年大会のアナウンス1)2022 Maritime RobotX Challenge Announced – RoboNation https://robonation.org/2022-maritime-robotx-challenge-announced/が出て,2022用のサイト2)RobotX Challenge 2022 – RobotX https://robotx.org/programs/robotx-challenge-2022/も出来ました.Task Ideas もリリースされたので,和訳ついでに大会の紹介をしていきます.
場所と日時
場所
2014年の初回大会はシンガポールのマリーナ・ベイサンズのすぐ近くで,その後はハワイのオアフ島で連続して開催されてきたこの大会ですが,次回はオーストラリアのシドニーにある「シドニー国際レガッタ・センター」というところで開催されます.
地図を見てもらえば分かる通り,海ではなくボート競技用の池もしくは湖といったところのようです.シドニーの市街地と「自然」のちょうど境目くらいにも見えます.波もほとんど無いでしょうし,その点についてはやりやすい環境なのかもしれません.ちなみに今年はUUVを用いるタスクがなくなってしまったのですが,水深とかも影響したのかもしれません(完全に想像です).
ここに約100m四方の競技エリアを3面並べて,大会を進めていくことになります.
日時
開催日は2022年11月11日から17日の7日間です.
気温に関しては日本の9月くらいでしょうか.時差は2時間だけなので,さほど気にはならないでしょう.
機体
WAM-V
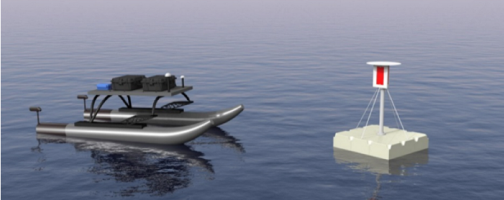
ベースとなるハードウェアは全チーム同じものを使用します.WAM-V3)Marine Advanced Robotics – WAM-V 16 ASV https://www.wam-v.com/wam-v-16-asvと呼ばれるカタマラン(双胴船)タイプの既製品のボートです.

この写真には色々と装備が付いていますが,配布される船体は本当に浮くための部分だけなので,船外機や計算機やセンサーは独自に搭載する必要があります.
UAV
今年からの大きな変化として,ドローン(UAV)を使うことが必須になりました.これに関しては標準機体などが配布される気配は(今のところ)ないので,ゼロから手配する必要があります.UAVでこなす必要があるタスクとそれに必要なセンサ群を考えると,片手に乗るようなサイズのものでは到底無理そうです.表現方法が合ってるか微妙ですが「業務用」と呼ばれるサイズ感のあるものを開発することになるでしょう.
タスク
陽にタスクとして設定されているタスクは6個あります.その他に,出走するために必要な動的安全審査として設定されているものが1個,競技中常に課されている(当然とも言うべき無言の圧力を感じる)課題が1個あります.予選までは各タスクは独立に挑戦可能ですが,決勝ではすべてのタスクを自律的に扱う必要があります.
ここからはタスクを1つずつピックアップして簡単に紹介していきます.
Entrance and Exit Gates
概要
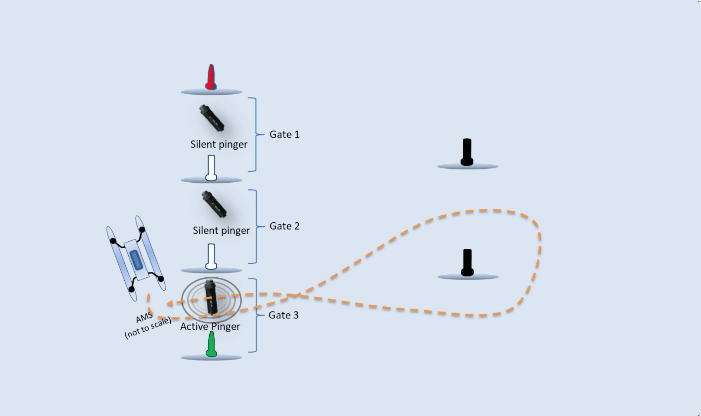
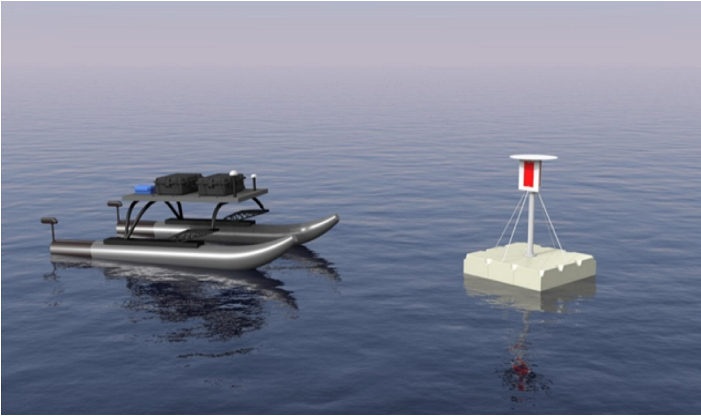
WAM-Vが,4つのブイで構成された3つのゲートの中から水中ピンガーが音を発しているゲートを見つけ出し,そこを出入り口としてその先のブイのどちらかを周回して帰ってくる.
タスク特有の技術要素(と感想)
水中で超音波帯域の音を出すピンガーの音をセンシングする必要があります.3個以上の水中マイクを使って音源の方位が分かればベストですが,音の大きさだけでも分かればWAM-Vを移動させることでどのゲートがアクティブなのかを知ることが出来ます.集音中は推進器を止めるなどの工夫が必要かもしれません.また,水深が浅い場合には水面と湖底で音が反射することでセンシングに失敗する可能性もあります.
Follow the Path
概要
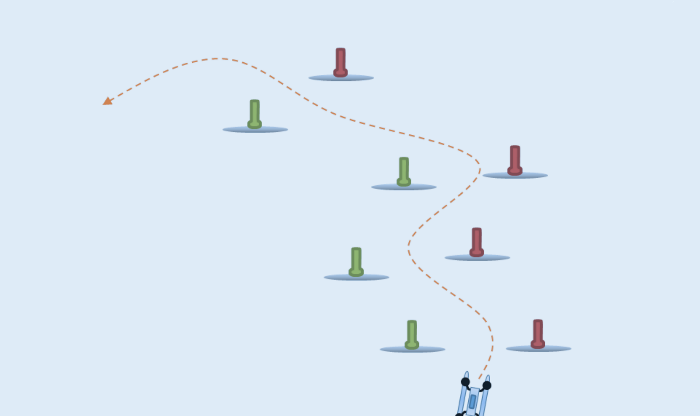
ブイによって経路が表現されているので,それに沿って進む.ただし,UAVを発進させて経路を見い出し,その結果をガイドとして利用してWAM-Vが進むこと.
タスク特有の技術要素(と感想)
UAVを発進させる必要があります.以前の大会ではUAV無しのバージョンが課されていたので,ただ進むだけならWAM-Vだけでも大丈夫ですが,UAVを使うことで逆に難易度が上がっています.UAVをWAM-Vのガイドとして利用する方法,もっというとガイドとして利用したことの証明をどのようにするのかが明記されていないので,それ次第というところはあります.
証明する必要がないのであれば,UAVをWAM-V直上にホバリングさせたまま(補助的なカメラ役として利用しつつ)タスクを完了することが出来ます.
Wildlife Encounter and Avoid
概要
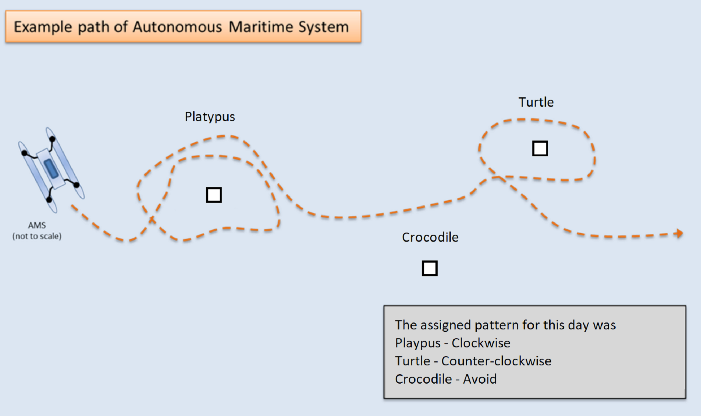
固有の反射スペクトルによって識別できる3つのブイが用意してあるので,事前に与えられた情報に従って,各ブイを通過or時計回りに回るor反時計回りに回ること.ただし,識別はハイパースペクトルカメラを搭載させたUAVが行うこと.
タスク特有の技術要素(と感想)
ハイパースペクトルカメラ(分光カメラ)を利用しないといけません.そしてそれをUAVに搭載させる必要があります.普通にハードウェアを揃えるだけでもハードルが高いです.分光カメラのデモ提供をしていただけるスポンサーを探すところから始める必要がありそうです.
分光イメージングが要求されてはいますが,あからさまに色が違う場合は普通のカメラで誤魔化せてしまうような気がします.しかし本当にそうであればこんな書き方をしたタスクをわざわざ設定しないだろうとも思うので,まずは塗装のサンプルを見せてほしいですね.
Scan the Code
概要
RGBの3色にのみ発光するLEDパネルを備えたブイを見つけ,その発光色パターンを報告する.
タスク特有の技術要素(と感想)
太陽光下での色認識が必要ですが,他のタスクでも使います.
Dock and Deliver
概要
横に3つ並んだドックの中から,予め指定された色のドックに着桟し,その後ラケットボールを正面に開いた穴の中に入れる.
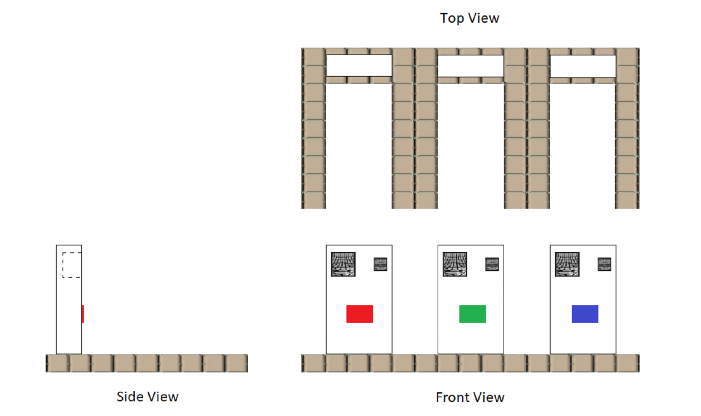
タスク特有の技術要素(と感想)
この方法が指定されている訳ではありませんが,ボールを投擲する必要があります.例年より波による揺れは小さいことが予測されるので,照準は比較的つけやすいかもしれません.幻の大会 RobotX 2020 では穴が傾斜面に開いていたので,それと比較すると難易度は下がって(上がらずに)います.
ドッキングに際しては横風に流されると辛いので,推進器の構成としてアジマススラスタなどを採用しておきたいです.
UAV Replenishment
概要
WAM-Vから発進したUAVが「Dock and Deliver」タスク用に設置されているドックの上に置かれている直径20cmのディスクをピックアップし,発光ビーコンにより識別できる沿岸のヘリパッドまで搬送する.
タスク特有の技術要素(と感想)
UAVによるディスクのピックアップと搬送が必要です.搬送先でディスクをどのような形態でリリースするのかは書かれていないので,機構的な複雑さはそれ次第という気もします.
ここまでで紹介したタスクからも分かるように,WAM-Vから発進してカメラでブイを認識出来て,分光イメージングが出来て,物も運べるとなるとそれなりのペイロードが必要です.
動的審査と障害物回避
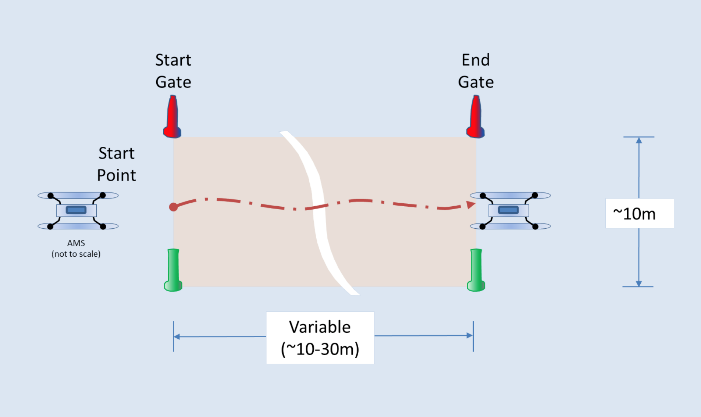
動的安全審査
かつてはこれも立派なタスクとして設定されていましたが,現在では動的な車検になっています.ブイで示された矩形状のコースを制御下の状態を保ったまま真っ直ぐ進みます.今回はこれをWAM-VとUAVの両方でチェックされます.
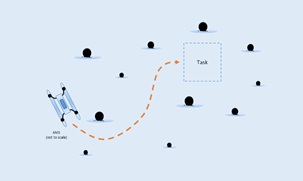
障害物回避
コース上の任意の場所に障害物に見立てたブイが設置されているので,回避して下さい(当たり前でしょ)という要求です.
まとめ
元から簡単な大会では決してありませんが,より輪をかけて大変になってきた感があります.
このタスクを見てビビッときた方,是非OUXT4)OUXT Polaris https://www.ouxt.jp/で一緒に開発しましょう.
References
| ⇧1 | 2022 Maritime RobotX Challenge Announced – RoboNation https://robonation.org/2022-maritime-robotx-challenge-announced/ |
|---|---|
| ⇧2 | RobotX Challenge 2022 – RobotX https://robotx.org/programs/robotx-challenge-2022/ |
| ⇧3 | Marine Advanced Robotics – WAM-V 16 ASV https://www.wam-v.com/wam-v-16-asv |
| ⇧4 | OUXT Polaris https://www.ouxt.jp/ |